


Wat is de impact van autonome shuttles op het ov?
vrijdag 22 januari 2021
De verwachtingen van autonome shuttles zijn hooggespannen, maar tot op heden zijn permanente toepassingen van een automatisch voertuig in het ov-systeem nog erg schaars, schrijft onderzoekster Reanne Boersma van de TU Delft en Hogeschool Rotterdam.
Steeds meer fabrikanten die automatische shuttles leveren, zijn gericht op het vervoer van meerdere personen in het ov-systeem. Uit verschillende studies is gebleken dat deze shuttles potentieel veiliger zijn en dat ze een vervoersoplossing kunnen bieden aan personen die nu beperkt zijn in hun bewegingsvrijheid vanwege hun leeftijd of een handicap. Denk hierbij aan ouderen, blinden of minder-validen. De verwachtingen zijn hooggespannen, maar tot op heden zijn permanente toepassingen van een automatisch voertuig in het ov-systeem nog erg schaars.
In het project Spatial and Transport impacts of Automated Driving (STAD) is onderzoek gedaan naar de mogelijke impact van automatische voertuigen op het reizigersgedrag, de kansen voor truckplatooning, de effecten op het wegennet, de interactie met voetgangers en fietsers en de ruimtelijke omgeving. In dit artikel gaan we in op reeds uitgevoerde praktijktesten en wat we daaruit kunnen leren over kansrijke situaties voor automatische voertuigen in het ov-systeem1.
Het idee van automatische voertuigen in het ov-systeem is niet nieuw. Sterker nog, de eerste pilots met automatische voertuigen vonden plaats in de jaren 90. Een van de resultaten uit die tijd, de Rivium ParkShuttle, reed zonder steward tussen metrostation Kralingse Zoom (Rotterdam) en bedrijventerrein Rivium (Capelle a/d IJssel) op een eigen baan. De tweede generatie ParkShuttle, operationeel sinds 2005, wordt dit jaar vervangen door de derde generatie. Het is de bedoeling dat deze nieuwe ParkShuttle straks niet alleen op de eigen baan rijdt, maar ook de openbare weg op gaat. De Rivium ParkShuttle is de enige permanente automatische shuttle in het ov-systeem in Nederland.
Mogelijkheden worden verkend
Ondanks dat operationele inzet van automatische voertuigen (nog) schaars is, worden de mogelijkheden voor de voertuigen in Nederland verkend. Het WEpod-project had als doel om zoveel mogelijk te leren over de techniek van het voertuig. De focus van het project lag daarbij op plaatsbepaling en deep learning met betrekking tot interactie met andere verkeerdeelnemers. Daarnaast was de WEpod het eerste automatische voertuig dat een ontheffing bij RDW heeft gekregen om op de openbare weg te mogen rijden. De discussies rondom het WEpod-project hebben bijgedragen aan het vormgeven van het aanvraagproces bij RDW.
De Appelscha-shuttle had als doel om te kijken of het mogelijk is om een automatisch voertuig in te zetten in een krimpregio. In het buitengebied heeft men te maken met een bevolkingskrimp, vergrijzing en krimpende ov-verbindingen. Voor de regionale overheden en de ov-autoriteiten is het dan ook een uitdaging om de regio leefbaar en bereikbaar te houden. Automatische voertuigen zouden een rol kunnen spelen in de oplossing voor het krimpende ov in de buitengebieden, omdat deze on-demand ingezet kunnen worden. Uit het project is gebleken dat het mogelijk is om met weinig infrastructurele aanpassingen een automatisch voertuig in te zetten, mits er genoeg ruimte is om andere verkeersdeelnemers te laten passeren of inhalen.
Niet alleen in Nederland wordt geëxperimenteerd met de inzet van automatische voertuigen, wereldwijd vinden allerlei pilots plaats. Uit een inventarisatie, uitgevoerd in samenwerking met het Autobus-project, is gebleken dat in Europa 118 pilots zijn uitgevoerd of nog in uitvoering zijn2. Om een beeld te krijgen van kansrijke situaties voor automatische voertuigen in het ov-systeem zijn de Europese pilots samengebracht met de opgedane kennis betreffende de casestudies van de Rivium ParkShuttle, WEpods en Appelscha. Deze inzichten zijn aangevuld met inzichten uit een aantal pilots uit de Verenigde Staten en interviews met ov-autoriteiten in Nederland, om te achterhalen hoe zij denken dat het ov-systeem van de toekomst eruit zal zien en of daarin plek is voor automatische voertuigen.
Lees ook: Nederland klaar voor autonome shuttles
Thema’s uitgediept
Om kansrijke locaties vast te stellen zijn drie thema’s verder uitgediept:
- De omgeving van het voertuig;
- De snelheid van het voertuig;
- De aanwezigheid van een steward.
De omgeving van het voertuig en de snelheid van het voertuig geven reeds een indicatie van de beperkingen van het systeem. Daarnaast heeft de aanwezigheid van een steward in het voertuig een negatief effect op de businesscase, wat de mogelijke inzet van de voertuigen kan belemmeren op de lange termijn. Immers, de verwachte vermindering van de kosten vanwege de afwezigheid van een bestuurder wordt daarmee teniet gedaan.
Uit de analyse blijkt met betrekking tot de omgeving, dat de voertuigen veelal opereerden in een semi-controleerbare openbare ruimte. Hierbij kan gedacht worden aan een campusomgeving of bedrijventerrein. Daarnaast blijkt uit de analyse dat de meeste pilots een aantal infrastructurele aanpassingen hadden doorgevoerd voor de pilot. Deze aanpassingen waren veelal tijdelijk van aard. Daarbij kan gedacht worden aan tijdelijke wegmarkering, waarschuwingsborden, wegkantsystemen en tijdelijke haltes. Het eerdergenoemde WEpod-project en de Appelscha-shuttle zijn ook uitgevoerd met dergelijke tijdelijke aanpassingen.
De Rivium ParkShuttle daarentegen opereert op een eigen baan. Dit betekent ingrijpende infrastructurele aanpassingen, maar ook weinig interruptie van andere weggebruikers, wat de uitvoering ten goede komt. Wat pilots van Nederland, Europa en de Verenigde Staten met elkaar gemeen hebben, is dat de omgeving van het voertuig vaak deels openbaar toegankelijk is en dat de voertuigen vaak ingezet worden op een plek waar de snelheid van de andere weggebruikers relatief laag is.
Met betrekking tot de snelheid blijkt dat 78 procent van 82 pilots in Europa een gemiddelde snelheid heeft van 21 km/u. Daarbij viel op dat veel pilots beperkt waren in de toegestane snelheid en dat de gemiddelde snelheid vaak lager was dan de ontwerpsnelheid van het voertuig. De Appelscha-shuttle reed bijvoorbeeld 15 km/u tijdens de pilot. Tijdens de uitvoer van de pilot bleek dat dit voor fietsers vaak te langzaam is, waardoor fietsers het voertuig probeerden te passeren. Dit bleek een complicatie: zowel bij de Appelscha-pilot als bij het WEpod-project werd een inhalende fietser soms aangezien als object. Veelal activeerde het inhalen van een fietser dan ook de noodstop. Dit bracht verwarring bij de fietsers en kan een nadelig effect hebben op het comfort van de passagiers. Met betrekking tot de pilots in de Verenigde Staten blijkt dat deze rond dezelfde snelheden opereren, tussen de 16 en 24 km/u.
In alle pilots in Nederland, Europa en de Verenigde Staten was een steward aan boord. De enige uitzondering is de Rivium ParkShuttle in Nederland. Het aanwezig zijn van een steward heeft mogelijk te maken met de wetgeving. In het verdrag van Wenen alsmede in de Nederlandse Wegenverkeerswet 1994 is opgenomen dat (kort gezegd) een bestuurder de controle moet hebben over het voertuig. Met de komst van de Experimenteerwet in Nederland is de mogelijkheid ontstaan om met een bestuurder op afstand te werken. Tot dusver is, voor zover de auteurs weten, nog geen vergunning afgegeven op basis van de Experimenteerwet.
Uitwerking scenario’s
Het type omgeving van de voertuigen is vaak een semi-gecontroleerde, openbaar toegankelijke omgeving zoals een campus of bedrijventerrein. Op basis van de bevindingen zijn een drietal scenario’s gecreëerd, zie figuur 1. Het eerste scenario toont een automatisch voertuig op een eigen baan. Dit betekent weinig interactie met het overige verkeer en daardoor minder interrupties in de uitvoering. Het tweede scenario toont een automatisch voertuig op de openbare weg, maar met eerder genoemde tijdelijke aanpassingen zoals waarschuwingsborden en pionnen. Daarbij is sprake van enige interactie met het overige verkeer, maar op lage snelheid. Deze situatie is vergelijkbaar met de semi-gecontroleerde, openbare situaties zoals campusgebieden en bedrijventerreinen. Het derde scenario toont een automatisch voertuig op de openbare weg, maar met een aantal infrastructurele aanpassingen zoals een snelheidsbeperking. De illustratie toont de toename van complexiteit waarin de automatische voertuigen opereren.
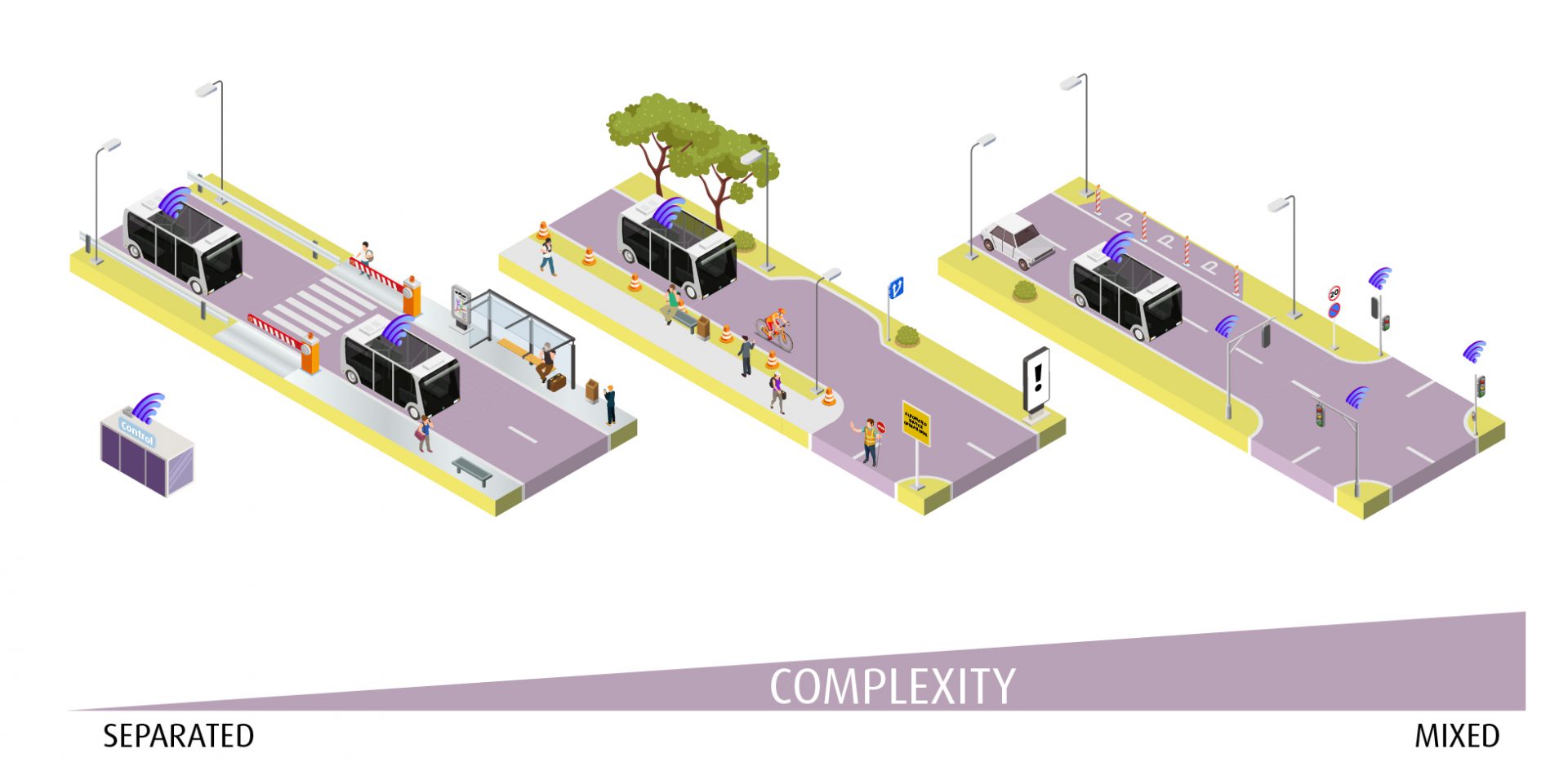
Figuur 1: Scenario’s voor automatische shuttles, op een vrije baan (links), op de openbare weg met tijdelijke aanpassingen (midden) en op de openbare weg met infrastructurele aanpassingen (rechts). Ontwerp van Arthur Scheltes – Goudappel Coffeng,
De pilots in Nederland, Europa en de Verenigde Staten tonen een brede interesse in het wereldwijd implementeren van automatische voertuigen in het ov-systeem. Bij elke nieuwe pilot worden technische problemen opgelost en de technologie verbetert snel. In Nederland lijkt een verschuiving plaats te vinden van een focus op technische aspecten naar een focus op het aanvullen van het huidige ov-systeem. Daardoor lijkt het doel van de pilots te verschuiven van kortetermijnexperimenten naar langetermijnpilots of zelfs permanente toepassingen.
De Experimenteerwet in Nederland biedt de mogelijkheid om te experimenteren met automatische voertuigen zonder steward aan boord. Dit zou mogelijk de overgang naar het exploiteren van automatische voertuigen zonder steward kunnen stimuleren, waardoor het inzetten van automatische voertuigen in het ov-systeem aantrekkelijker zou kunnen worden voor ov-bedrijven of -autoriteiten. Immers, de totale operationele kosten zullen naar verwachting dalen door de afwezigheid van een bestuurder of steward in het voertuig.
Voetnoten
1 Publicaties (WEpods, Rivium ParkShuttle, Appelscha, AV vs OV) zijn te vinden op stad.tudelft.nl/
2 Hagenzieker, M.P., Boersma, R., Nunez Velasco, J.P., Ozturker, M., Zubin, I., Heikoop, D. (2020) Automated Buses in Europe: An Inventory of Pilots, version: 1.0. Researchgate: researchgate.net/publication/339916105_Automated_Buses_in_Europe_An_Inventory_of_Pilots_version_10
Dit artikel is eerder verschenen in OV-Magazine 4-2020. Wilt u OV-Magazine voortaan in print of digitaal ontvangen? Neem contact op of neem een abonnement.

Aanmelden voor de nieuwsbrief
Gerelateerde artikelen, events & downloads •

Vrijwilligersvervoer is onzichtbaar vervoer
15 apr om 13:38 uurMarieke Boon is één van de oprichters van het Kenniscentrum Vrijwilligersvervoer en werkt nu zo’n drie jaar als…

Inclusief openbaar vervoer: meer dan veiligheid alleen
11 apr om 12:59 uurHet gevoel van veiligheid in het openbaar vervoer staat onder druk. Uit onderzoek van MuConsult blijkt dat het…

Samen sterker: publiek vervoer en de kansen bij de vergrijzing
10 feb om 15:20 uurNederland vergrijst in rap tempo, en dat heeft gevolgen voor de manier waarop we ons verplaatsen. Voor veel…

Belofte EU-kandidaat commissaris: met één klik je Europese treinreis boeken
24 dec 2024Binnenkort is het mogelijk om met één klik je internationale treinreis te boeken. Dit beloofde de beoogd…

3 stappen naar betrouwbare bussen: investeer op basis van rijtijdanalyses
21 nov 2024In een tijd waar betrouwbaar en betaalbaar ov van vitaal belang is voor de mobiliteit, speelt de doorstroming…

Het ov hoeft niet rendabel te zijn
28 okt 2024In 2023 schreef Keypoint over het idee van het aanpassen van de financieringswijze…

PBL: Toenemende reistijden voor OV-reizigers zorgwekkend
26 sep 2024De bereikbaarheid van essentiële voorzieningen zoals ziekenhuizen, scholen en werkplekken is voor mensen die…

De Staat van het OV 2023 gepubliceerd tijdens Dag van het OV
25 jun 2024Tijdens de Dag van het OV op maandag 17 juni in het Spoorwegmuseum te Utrecht mocht DOVA-Jan van Selm het…

Internationale bus kan ook concurreren met vliegtuig
14 nov 2023Vaak noemen we de internationale trein als alternatief voor het vliegtuig op korte afstanden. Maar de…

Kansen en kennisvragen rond automatisering ov-diensten
30 jun 2023Het is allang niet meer de vraag óf geautomatiseerd rijden mogelijk is, maar hooguit wanneer het gemeengoed…
Reactie plaatsen •